
![]()
![]()
![]()
![]()
![]()
![]()
偦偺柤偼亀儊儕僢僒亁 亀儊儕僢僒亁偼丄斈梡僷乕僣偺慻崌偣偱偱偒偰偄傞偨傔丄帺暘棳偵娙扨偵傾儗儞僕偡傞偙偲偑偱偒傑偡丅 懳徾僒乕儃儌乕僞乕偼丄嬤摗壢妛噴偺乽KRS-4000僔儕乕僘乿丅側偺偱丄梊嶼傗栚揑偵崌傢偣偰悢庬椶偺僒乕儃傪帺桼偵慻傒懼偊傞偙偲偑壜擻偱偡丅 偙傟傑偱ROBO-ONE 側偳偺奺庬嫞媄夛偱桪廏側惉愌傪廂傔偰偒偨乽KRS-4000僔儕乕僘乿偱偡偑丄偦偺乽昗弨儌僨儖乿偲屇傋傞傕偺偑偁傝傑偣傫偱偟偨丅 偦偙偱丄弶怱幰偐傜儅僯傾偵帄傞傑偱丄懡偔偺曽偺梫朷偵墳偊傞傋偔峫偊偩偝傟偨偺偑亀儊儕僢僒亁側偺偱偡丅 亀儊儕僢僒亁偼丄婎杮揑偵傾儖儈僼儗乕儉傪拞怱偲偟偨僷乕僣僙僢僩偱偡丅僒乕儃儌乕僞乕傗僐儞僩儘乕儖儃乕僪偼晅偄偰偄傑偣傫丅偦傟偧傟偺僷乕僣偼扨昳斕攧偟傑偡偺偱丄昁梫側僷乕僣傗僒乕儃儌乕僞乕側偳偲慻崌傢偣偰丄擖栧婡偐傜僗乕僷乕儅僔儞傑偱岲傒偺儌僨儖偵巇忋偘傞偙偲偑偱偒傞傛偆偵側偭偰偄傑偡丅 |
 |
 |
丒斈梡僷乕僣傪巊梡偟丄扤偱傕嶌傞偙偲偑偱偒傞丅仺夵憿丒晹昳挷払偑梕堈 丒掅廳怱偱埨掕偟偨擇懌曕峴傪幚尰仺僔儑乕僩儗僢僌丄懌庱捈岎幉壔 丒僐儞僷僋僩偱庢埖偄傗偡偄僒僀僘丅仺恎挿丗栺34們倣丂懱廳丗1.7倠倗乣 丒恖娫偵嬤偄僾儘億乕僔儑儞偱恖偺傛偆側摦偒偑偱偒傞丅僒乕儃悢20屄 丒奼挘惈偑崅偔僌儗乕僪傾僢僾偑梕堈仺KRS-4000丄4030僔儕乕僘嫟捠僼儗乕儉 丒庤帩偪偺晹昳傗僒乕儃傪棳梡偱偒傞丅仺僙僇儞僪婡偺惢嶌偵僺僢僞儕 |
| 儊儕僢僒摦夋 | 儊儕僢僒S乮僗僞儞僟乕僪媺乯丂慜曕峴丒屻曕峴丒慜僷儞僠丒婲忋傝丒摦嶌慻崌偣 |
| 儊儕僢僒俿乮僩儔僀僽媺乯丂丂丂丂僒僀僪僷儞僠丂 | |
| 儊儕僢僒H乮僗乕僷乕僿僇僩儞働僀儖媺乯丂丂僕儍乕儅儞僗乕僾儗僢僋僗丂僼儘儞僩僗乕僾儗僢僋僗 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂梺傃偣搢偟丂惓対撍偒丂慜僷儞僠丂僒僀僪僷儞僠1丂僒僀僪僷儞僠2丂 |
|
| 儊儕僢僒丒僿僇僩儞働僀儖丂僑僢僪僴儞僪儗儃儕儏乕僔儑儞丂丂抋惗丂曕峴懠 | |
| 偑傫偽傟両僿僇偪傖傫丂丂 偦偺1丂乽弶傔偰偺偍庤揱偄乿丂丂偦偺2丂乽僠儑僉偑乧乿 | |
乽儊儕僢僒丒僿僇僩儞働僀儖丂僑僢僪僴儞僪儗儃儕儏乕僔儑儞乿  丂乽僑僢僪僴儞僪乿偺庴拲惗嶻傪奐巒偟傑偟偨丅偙偪傜 |
乽儊儕僢僒僴儞僪丂僞僀僾1乿  丂乽儊儕僢僒僴儞僪丂僞僀僾1乿偺斕攧傪奐巒偟傑偡丅徻嵶偼偙偪傜丂丂丂摦夋偼偙偪傜 |
 |
| 僶僩儖摦夋 | 儊儕僢僒H乮僗乕僷乕僿僇僩儞働僀儖媺乯 |
| 丂丂丂丂丂丂丂丂丂丂儊儕僢僒僷乕僣僙僢僩---拲暥僐乕僫乕偼偙偪傜 | ||
亸20,750乮惻崬亸21,787乯 |
亸25,900乮惻崬亸27,195乯 |
亸12,500乮惻崬亸13,125乯 |
 |
 |
 |
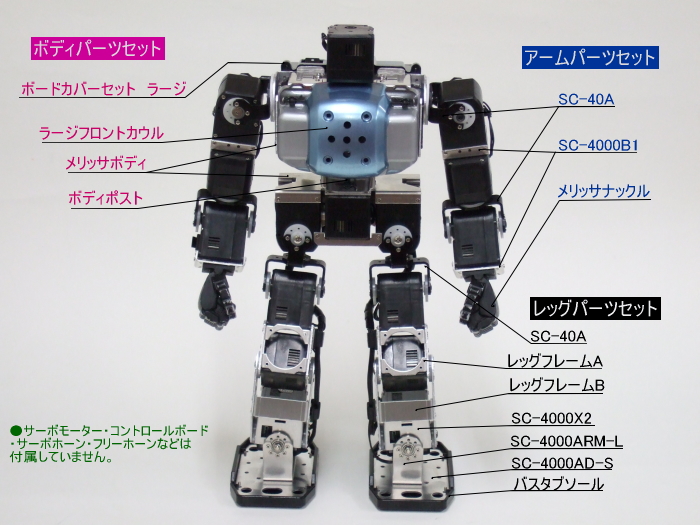
| 丒儊儕僢僒儃僨傿丂亸15,000乮惻暿乯 丒儔乕僕僼儘儞僩僇僂儖丂亸1,800 丒儃僨傿僇僶乕僙僢僩丂儔乕僕丂亸3,500 丒儃僨傿億僗僩丂亸450 |
丒儗僢僌僼儗乕儉A+B丂亸8,000乮惻暿乯 丒SC-40A丂4僐僙僢僩丂亸5,000 丒SC-4000X2丂2僐僙僢僩丂亸5,200 丒SC-4000ARM-L丂2僐僙僢僩丂亸2,900 丒SC-4000AD-S丂2僐僙僢僩亸2,800 丒僶僗僞僽僜乕儖丂2僐僙僢僩丂亸2,000 |
丒SC-40A丂4僐僙僢僩丂亸5,000乮惻暿乯 丒SC-4000B1丂4僐僙僢僩丂亸4,500 丒儊儕僢僒僫僢僋儖丂2僐僙僢僩丂亸3,000 |
 崢儓乕幉巇條 |
 埨掕姶偺偁傞僔儑乕僩儗僢僌 |
 嫮偦偆側榬偭愡両 |
| 偦傟偧傟偺僷乕僣偼扨昳斕攧偄偨偟傑偡丅 | ||
 |
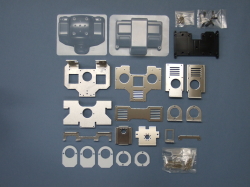
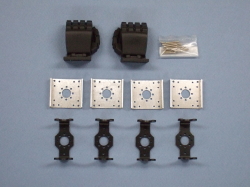
2媟暘1僙僢僩 亸28,000 乮惻崬亸29,400乯 丒R傾乕儉丂4僐 丒P傾乕儉丂8僐 丒X-BK丂丂4僐 丒P-BK丂丂4僐 丒儃乕儖儀傾儕儞僌 丂16僐 丒僱僕儚僢僔儍僙僢僩 |
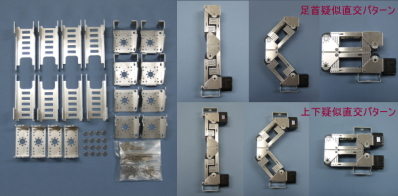
KRS-4000斣梡暯峴儕儞僋婡峔僷乕僣僙僢僩丅 廳検婡懱傗寉検媺偺応崌偺掅僩儖僋僒乕儃 巊梡偱傕埨掕偟偨曕峴媦傃巔惃堐帩偑壜擻 偱偡丅 仠乽懌庱偺傒媈帡捈岎幉僷僞乕儞乿(僒乕儃 丂悢5屄乯偲乽忋壓嫟媈帡捈岎幉僷僞乕儞乿 丂乮僒乕儃悢6屄乯偺俀僷僞乕儞偑偱偒傑偡丅 仠儊儕僢僒儃僨傿偵偼丄懌庱偺傒僷僞乕儞偑 丂憰拝壜擻偱偡丅 丂忋壓僷僞乕儞偺応崌偼R-Blue Body乮惓妋 丂偵偼崢晹暘乯偑昁梫偱偡丅 仠僒僀僘乮僼儗乕儉晹暘偺傒丄怢恎帪乯 丒懌庱偺傒捈岎僷僞乕儞丂280亊48亊42mm 丒忋壓嫟捈岎僷僞乕儞丂丂302亊48亊42mm |
丂  丂丂丂 丂丂丂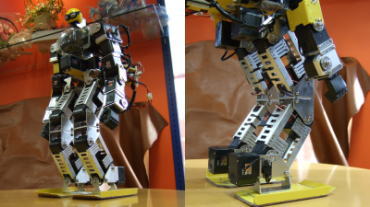 僗乕僷乕僨傿僈乕嘦for JSRC乮傂傠偺偭偪巵乯丅JSRC巄掕慡崙戝夛桪彑丅丂丂automo 06丒Wakka乮holypong巵乯丅偍庤揱偄僾儘僕僃僋僩梡婡懱丅儕儞僋媟 儕儞僋晹暘偼KRS-4024傪巊梡丅媟晅偗崻儘乕儖偼4024傪僟僽儖偱憰拝丅丂丂偵偡傞偙偲偱曕峴埨掕惈偑奿抜偵岦忋丅儕儞僋晹暘偼KRS-4014傪巊梡丅 |
||
| 仸暯峴儕儞僋婡峔偼丄壜摦帪偵寗娫偵巜摍傪嫴傫偩傝偡傞偲廳彎傪晧偆婋尟惈偑偁傝傑偡丅庢埖偄偵偼廫暘偛拲堄偔偩偝偄丅摿偵偍巕條偼戝曄婋尟 偱偡偺偱丄怗傟側偄傛偆尩廳偵娗棟偟偰偔偩偝偄丅慻傒棫偰屻偼丄庽帀斅摍傪價僗巭傔偟偰寗娫傪柍偔偡偐丄奜憰側偳偱曐岇偟偰偔偩偝偄丅 |
||
| 億僀儞僩-1 | 斈梡僷乕僣傪懡梡 慻棫傗夵憿偑梕堈偱丄帺暘岲傒偺儘儃僢僩偵巇忋偘傞偙偲偑偱偒傑偡丅奺晹昳偼挷払偟傗偡偄偺偱丄攋懝偟偨帪傗媫側惢嶌偵傕峇偰偢偵偡傓偺偱曋棙偱偡丅 奺僼儗乕儉偼僆乕儖傾儖儈惢丅寉偔偰忎晇側忋丄峔憿偑娙扨側偺偱儊儞僥僫儞僗惈傕椙岲偱偡丅 巹乮揦挿乯偺傛偆側暥宯偵偼斈梡僷乕僣偼寚偐偣傑偣傫丅惛搙傕敳孮側偺偱偡偖偵巊偊偰戝曄廳曮偟偰偄傑偡丅僼儗乕儉偼斈梡偵偟偰丄儌乕僔儑儞傗奜憰偱嵎暿壔傪寁偭偰偄傑偡丅傕偪傠傫丄偳偆偟偰傕昁梫側晹昳偼帺暘偱嶌傝傑偡偑乧 |
 懡條側斈梡昳傪棙梡偡傞儊儕僢僩偼懡偄丅 惛搙偑崅偔丄慻棫丒晹昳挷払偑梕堈 |
|
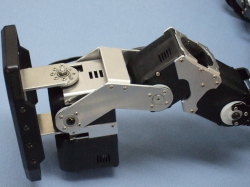
| 億僀儞僩-2 | 掅廳怱仌埨掕偟偨擇懌曕峴 4000斣巊梡偺婡懱偲偟偰偼嵟抁偺僔儑乕僩儗僢僌傪幚尰偟傑偟偨丅媟偺晅偗崻僺僢僠幉偐傜懌棤傑偱偺挿偝偼栺15們倣丅媟傪抁偔偟偨偙偲偱廳怱偑壓偑傝丄埨掕偟偨擇懌曕峴偑壜擻偵側傝傑偟偨丅偝傜偵丄懌庱僺僢僠幉傪捈岎幉壔偡傞偙偲偵傛傝偝傜偵埨掕搙偑憹偟偰偄傑偡丅 傑偨丄懌庱僺僢僠幉埵抲偑壓偑偭偨偙偲偵傛傝丄僕儍僀儘僙儞僒乕偵傛傞巔惃惂屼偺岠棪傕岦忋偟傑偡丅 儗僢僌僷乕僣A偵偼僒乕儃僋乕儔乕庢晅偗僗僥乕偑晅偄偰偄傑偡丅 |
 挻僔儑乕僩儗儞僕偺媟晹丅尒偨栚捠傝埨掕姶敳孮偱偡丅僺僢僠幉娫嫍棧偼59.5倣倣 |
|
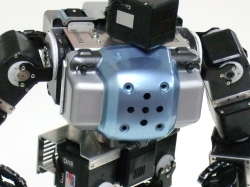
| 億僀儞僩-3 | 僐儞僷僋僩偱埖偄傗偡偄僒僀僘 恎挿栺34們倣偼嬤摗壢妛惢乽KHR-2HV乿偲傎傏摨偠僒僀僘丅媟晹僺僢僠幉娫嫍棧傕摨偠偱偡丅懱廳偼丄僆乕儖4024巇條偱栺1.7倠倗丅儌乕僔儑儞嶌惉傕妝偵峴偊傞僒僀僘偱偡丅 擇懌曕峴儂價乕儘儃僢僩偑戝宆壔偵岦偐偆拞丄偁偊偰彫宆婡偺埖偄傗偡偝偲柺敀偝傪採埬偄偨偟傑偡偭両 巹偺乽HAUSER乿偼2.99倠倗偱偡偑丄挿帪娫偺儌乕僔儑儞嶌惉偼榬偑旀傟傑偡丟2倠倗埲壓偼儂儞僩偵妝偱偡傛乣両偙偺僒僀僘偼丄僒僢僇乕傗Blaser丄SRC乮僗僞儞僟乕僪儗僊儏儗乕僔儑儞僋儔僗乯僶僩儖偵傄偭偨傝偱偡偹丅 |
 恎挿偼傎傏摨偠丅儊儕僢僒偺曽偑崪懢側姶偠丅4000斣偺僐儘僐儘偟偨姶偠偦偺傑傑 |
|
| 億僀儞僩-4 | 恖娫偵嬤偄僾儘億乕僔儑儞 僔儑乕僩儗僢僌壔偟偨偙偲偱丄旕忢偵恖娫偵嬤偄僾儘億乕僔儑儞偵側傝傑偟偨丅昁梫僒乕儃悢偼20屄偱丄傎傏僼儖壜摦忬懺偱偡丅 崢儓乕幉丒榬儓乕幉巇條側偺偱丄傛傝恖娫傜偟偄摦偒傕壜擻偵側傝傑偟偨丅 媟傪抁偔偟偨傜媫偵恖偭傐偔側偭偰傃偭偔傝両廬棃偺儘儃僢僩偺媟偼挿偡偓傞傫偱偡偹丅摦偒傕恖娫偭傐偔偟偨偐偭偨偺偱偁偊偰20幉巇條偵偟偰傒傑偟偨丅 偙傟偩偗偁傟偽丄僶僩儖偩偗偱偼側偔條乆側僷僼僅乕儅儞僗傪偡傞偺偵傕廩暘偱偡偹丅偙偺傑傑偱傕懌忋偘慁夞偑偱偒傞偺偱丄媟晅偗崻儓乕幉偼尒憲傝偱偡丅 |
 傂偞傑偯偄偰偍帿媀丅恖傜偟偄摦偒傪偝偣傞偲恊偟傒傕憹偡丅僶僩儖埲奜偺梀傃傕OK |
|
| 億僀儞僩-5 | 奼挘惈偑崅偔僌儗乕僪傾僢僾偑梕堈 KRS-4000僔儕乕僘嫟捠僼儗乕儉側偺偱丄4024偐傜4033傊偺僒乕儃儌乕僞乕偺擖傟懼偊側偳僗儉乕僘偵峴偊傑偡丅僼儗乕儉傪曄峏偣偢偵丄僗僺乕僪傾僢僾傗僩儖僋傾僢僾側偳丄婡懱偺僌儗乕僪傾僢僾偑壜擻偱偡丅乮儌乕僔儑儞偺挷惍偼昁梫偱偡乯 媟晹偼僴僀僩儖僋僒乕儃乮4034乯丄榬偼僴僀僗僺乕僪僒乕儃乮4032乯偵偡傞側偳丄帺暘側傝偺帺桼側傾儗儞僕偑峴偊傑偡丅 夵憿偡傞帪丄堦儢強曄偊傞偲堭偯傞幃偵曄峏儢強偑弌偰偒偰廂廤偑晅偐側偔側傞偙偲偑偁傝傑偡傛偹丅嫟捠僼儗乕儉偩偲僒乕儃偺岎姺偩偗偱OK両僴僀僩儖僋壔傕娙扨偱偡丅僒乕儃攝抲傕帺暘棳偵傾儗儞僕偱偒傑偡丅 |
 擸傑偢偵僌儗乕僪傾僢僾偱偒傞偺偑儈僜丅惢嶌帪娫傪抁弅偟儌乕僔儑儞嶌傝偵愱擮偱偒傞 |
|
| 億僀儞僩-6 | 庤帩偪偺晹昳傗僒乕儃偑棳梡偱偒傞 儊儕僢僒偼婎杮揑偵僼儗乕儉僙僢僩側偺偱丄梋偭偰偄傞僒乕儃傗晹昳傪棳梡偟偰巊偆偙偲偑偱偒傑偡丅 傑偨丄偦傟偧傟偺僼儗乕儉偼扨昳斕攧偟傑偡偺偱丄昁梫側僷乕僣偩偗偺峸擖傕壜擻偱偡丅柍懯側偔儘儃僢僩偺惢嶌偑偱偒傑偡丅 僐僐偩偗偺榖偱偡偑丄寢峔4024傪帩偭偰偄傞曽偑懡偄傛偆側偺偱丄乽偦傟傪巊偭偰僙僇儞僪婡傪嶌偭偰SRC偱梀傃傑偣傫偐丠乿偲偄偆採埬偱傕偁傝傑偡丅傕偪傠傫乽僿僇僩儞働僀儖媺乿偱ORC偱傕OK偱偡丅 |
 4000斣偑梋偭偰偄傞傛偆側傜丄儊儕僢僒僷乕僣偱柍懯側偔僙僇儞僪婡偺惢嶌偑偱偒傞 |
|
| 仠儊儕僢僒偺惢嶌椺 儊儕僢僒偼僷乕僣僙僢僩側偺偱僒乕儃儌乕僞乕偺慻崌傢偣偵傛偭偰條乆側僶儕僄乕僔儑儞偑懚嵼偟傑偡丅 弶傔偐傜忋埵婡偵偡傞偐丄彊乆偵僴僀僩儖僋壔偡傞偐偼惢嶌幰偟偩偄両帺暘岲傒偺儘儃僢僩惢嶌偑 壜擻偱偡丅 |
|
嶌椺1 |
儊儕僢僒S乮僗僞儞僟乕僪乯乧僴僀僩儖僋僒乕儃偺巊梡側偟 丒僒乕儃儌乕僞乕丗KRS-4024乮4031乯亊20屄 杮奿揑擇懌曕峴儘儃僢僩偺擖栧婡偲偟偰嵟揔丅曕峴僥僗僩梡妛廗嫵嵽偲偟偰偺妶梡傕偱偒傞丅 SRC婯奿丅 |
嶌椺2 |
儊儕僢僒T乮僩儔僀僽媺乯乧僴僀僩儖僋僒乕儃偺巊梡偼5屄埲撪 丒僒乕儃儌乕僞乕丗KRS-4033乮枖偼4034乯亊5屄丂KRS-4024乮4031乯亊15屄 懌庱丒旼側偳丄晧壸偑偐偐傝傗偡偄晹暘偵僴僀僩儖僋僒乕儃傪巊梡丅 埨掕惈丄懴媣惈丄嵞尰惈偑奿抜偵傾僢僾偡傞丅奿摤媄丒僒僢僇乕側偳奺庬嫞媄夛岦偒丅 堦斣偍姪傔偺婡懱丅 SRC婯奿丅 |
嶌椺3 |
儊儕僢僒H乮僿僇僩儞働僀儖媺乯乧僴僀僩儖僋僒乕儃偺巊梡偑6屄埲忋 丒僒乕儃儌乕僞乕丗KRS-4033乮枖偼4034乯亊6屄埲忋 僴僀僩儖僋僒乕儃6屄埲忋巊梡偺忋埵婡庬丅奿摤媄丒僒僢僇乕側偳偱嬌傔偰崅偄塣摦惈擻傪敪婗丅 僩儖僋偵梋桾偑偁傞偨傔丄廳検憹傪婥偵偡傞偙偲側偔奜憰偺憰拝傕壜擻丅 摿偵僴僀僩儖僋僒乕儃傪19屄埲忋巊梡偡傞応崌偼乽僗乕僷乕僿僇僩儞働僀儖乿偲屇傃丄嵟忋埵婡庬偲側傞丅 ORC婯奿丅 |
嶌椺4 |
儊儕僢僒E乮僄僋僔乕僪媺乯乧慡崅500mm埲忋偺戝宆婡 暯峴儕儞僋媟乽儅乕僉儏儕乕乿傗KRS-6000僔儕乕僘摍傪巊梡偟偨戝宆偺儊儕僢僒丅 僴儞僪儐僯僢僩偺憰拝偑壜擻偱丄傛傝恖娫偵嬤偄摦嶌偑壜擻偲側傞丅 僶僩儖偱偺愴摤擻椡偺崅偝偼幚徹嵪傒偱丄僷僼僅乕儅儞僗惈偵晉傫偩僾儔僢僩僼僅乕儉儘儃僢僩偲偟偰偺妶梡傕壜擻丅 |
僿僇僩儞働僀儖媺偺塣摦惈擻傪偝傜偵忋偘傞偨傔丄媟晹傪僀僩乕儗僀僱僣偺SC僽儔働僢僩偵曄偊傞偙偲偱丄僟僽儖旼丄媟儓乕幉捛壛丄媟晹晅偗崻捈岎幉壔傕偱偒傑偡丅偦偺応崌偼丄SC-4000L1丄SC-4000X2丄崢儓乕幉捛壛僾儗乕僩偑昁梫偱偡丅 |
|
| 乽PWM僒乕儃偲SIO僒乕儃偺僷儔儊乕僞乕偺曄姺攞棪偵偮偄偰乿 KRS-4024傪4013偵擖傟懼偊偨帪傗丄PWM偐傜SIO乮僔儕傾儖惂屼乯偵曄峏偟偨帪偼僷儔儊乕僞乕偺悢抣傪曄姺偡傞昁梫偑偁傝傑偡丅 丂KRS-4024HV乮PWM乯丂仺丂KRS-4013HV/4014HV乮SIO乯丂=丂14.815攞 丂KRS-4013HV/4014HV乮PWM乯丂仺丂KRS-4013HV/4014HV乮SIO乯丂=丂15.1攞 丂KRS-788HV丄KRS-2350HV丂仺丂KRS-4013HV/4014HV乮SIO乯丂=丂10.252攞丂 丂仸嶲峫丗SIO儌乕僪偺KRS-4013HV/4014HV/4031HV/4032HV/4033HV/4034HV偼侾僷儔儊乕僞乕偵偮偒0.03375搙偺摦嶌偲側傝傑偡丅 乮4000僷儔儊乕僞乕偱135搙摦嶌偟傑偡乯 |
|
| KRS-4000僔儕乕僘僒乕儃儌乕僞乕 | 僐儞僩儘乕儖儃乕僪 | ||||
KRS-4024SHV |
KRS-4013HV |
KRS-4014SHV |
RCB-3HV |
||
| 仠嵟戝摦嶌妏搙丂260亱 仠僩儖僋丂10.5倠倗丒們倣 仠僗僺乕僪丂0.17sec/60亱 仠43亊32亊32.5倣倣 仠48.5倗 仠揹尮揹埑丂9乣12V 仠儊僞儖僊傾偲庽帀僊傾偺僴僀僽儕僢僪峔惉偵傛傝僊傾嫮搙傪傾僢僾 仸惢憿拞巭 |
仠嵟戝摦嶌妏搙丂270亱 仠僩儖僋丂27.0倠倗丒們倣 仠僗僺乕僪丂0.12sec/60亱 仠43亊32亊32.5倣倣 仠65倗 仠揹尮揹埑丂9乣12V 仠嫮壔僼傽僀僫儖僊傾 仠慡抜儊僞儖僊傾 仠僗僺乕僪僞僀僾 仸惢憿拞巭 |
仠嵟戝摦嶌妏搙丂270亱 仠僩儖僋丂40.8倠倗丒們倣 仠僗僺乕僪丂0.19sec/60亱 仠43亊32亊32.5倣倣 仠65倗 仠揹尮揹埑丂9乣12V 仠嫮壔僼傽僀僫儖僊傾 仠慡抜儊僞儖僊傾 仠僩儖僋僞僀僾 仸惢憿拞巭 |
仠崅懍側柦椷幚峴偑壜擻側CPU傪嵦梡 仠弌椡億乕僩丂24億乕僩 仠PWM媦傃ICS2.0偵弨嫆偡傞僔儕傾儖捠怣偺懠H/L弌椡偲偟偰傕愝掕壜擻 仠崅懍偲掅懍偺僔儕傾儖億乕僩傪憰旛 仠傾僫儘僌擖椡億乕僩3億乕僩丅僕儍僀儘側偳偺傾僫儘僌怣崋偺擖椡偵傛傞儈僉僔儞僌傗忦審暘婒偵傛傞儌乕僔儑儞幚峴偑壜擻丅 仠摦嶌揹埑丂9乣12V |
||
| KRS-4030僔儕乕僘僒乕儃儌乕僞乕 | |||||
KRS-4031HV |
KRS-4032HV |
KRS-4033HV |
KRS-4034HV |
||
| 仠嵟戝摦嶌妏搙丂270亱 仠僩儖僋丂13.0倠倗丒們倣 仠僗僺乕僪丂0.16sec/60亱 仠43亊32亊32.5倣倣 仠55.2倗 仠揹尮揹埑丂9乣12V 仠儊僞儖僊傾偲庽帀僊傾偺僴僀僽儕僢僪峔惉丂傾儖儈僼傽僀僫儖僊傾 |
仠嵟戝摦嶌妏搙丂270亱 仠僩儖僋丂19.8倠倗丒們倣 仠僗僺乕僪丂0.08sec/60亱 仠43亊32亊32.5倣倣 仠60.2倗 仠揹尮揹埑丂9乣12V 仠嫮壔僼傽僀僫儖僊傾 仠慡抜儊僞儖僊傾 仠挻僗僺乕僪僞僀僾 |
仠嵟戝摦嶌妏搙丂270亱 仠僩儖僋丂30.6倠倗丒們倣 仠僗僺乕僪丂0.12sec/60亱 仠43亊32亊32.5倣倣 仠61.4倗 仠揹尮揹埑丂9乣12V 仠嫮壔僼傽僀僫儖僊傾 仠慡抜儊僞儖僊傾 仠僗僺乕僪僞僀僾 |
仠嵟戝摦嶌妏搙丂270亱 仠僩儖僋丂41.7倠倗丒們倣 仠僗僺乕僪丂0.17sec/60亱 仠43亊32亊32.5倣倣 仠61.2倗 仠揹尮揹埑丂9乣12V 仠嫮壔僼傽僀僫儖僊傾 仠慡抜儊僞儖僊傾 仠僩儖僋僞僀僾 |
||
| 偦偺懠昁梫側傕偺丗僶僢僥儕乕丄廩揹婍丄僒乕儃儂乕儞丄僼儕乕儂乕儞丄愙懕働乕僽儖丄柍慄僐儞僩儘乕儔乕丄僕儍僀儘丄 僷僜僐儞乮XP乯丄僪儔僀僶乕丄榋妏儗儞僠1.5丒2.0倣倣丄僇僢僞乕側偳 |
|||||